“In mathematics you don’t understand things. You just get used to them.”
— John von Neumann
“Nature uses only the longest threads to weave her patterns, so that each small piece of her fabric reveals the organization of the entire tapestry.”
— Richard Feynman
Learning Outcomes
By the end of Part 4, you will be able to:
Diagnose when random walk Metropolis-Hastings fails (strongly correlated posteriors) using visual and quantitative metrics
Explain why gradients provide directional information that makes sampling exponentially more efficient
Derive Hamiltonian Monte Carlo from Hamilton’s equations and recognize it as N-body simulation in parameter space
Implement HMC by adapting your Project 2 leapfrog integrator to parameter space
Compute gradients via finite differences and understand why automatic differentiation is superior
This part builds on everything you’ve learned about MCMC, physics, and computation. Here’s the journey:
Show code
flowchart TD A["Metropolis-Hastings\nstruggles with correlations"] --> B["Random walks\nare inefficient"] B --> C["Need directional\ninformation"] C --> E["Use Gradients!\ngrad log p"] E --> F["Hamiltonian\ndynamics"] F --> G["HMC\nLeapfrog integrator"] G --> H["NUTS\nAuto-tuning"] H --> I["JAX + NumPyro"] classDef problem fill:#BF616A,stroke:#2E3440,stroke-width:2px,color:#fff classDef insight fill:#A3BE8C,stroke:#2E3440,stroke-width:2px,color:#fff classDef solution fill:#5E81AC,stroke:#2E3440,stroke-width:2px,color:#fff classDef tools fill:#EBCB8B,stroke:#2E3440,stroke-width:2px,color:#2E3440 class A problem class E insight class G solution class I tools
flowchart TD
A["Metropolis-Hastings\nstruggles with correlations"] --> B["Random walks\nare inefficient"]
B --> C["Need directional\ninformation"]
C --> E["Use Gradients!\ngrad log p"]
E --> F["Hamiltonian\ndynamics"]
F --> G["HMC\nLeapfrog integrator"]
G --> H["NUTS\nAuto-tuning"]
H --> I["JAX + NumPyro"]
classDef problem fill:#BF616A,stroke:#2E3440,stroke-width:2px,color:#fff
classDef insight fill:#A3BE8C,stroke:#2E3440,stroke-width:2px,color:#fff
classDef solution fill:#5E81AC,stroke:#2E3440,stroke-width:2px,color:#fff
classDef tools fill:#EBCB8B,stroke:#2E3440,stroke-width:2px,color:#2E3440
class A problem
class E insight
class G solution
class I tools
The narrative arc: We’ll start by diagnosing when Metropolis-Hastings struggles (correlated posteriors), discover why gradients are powerful (they point uphill!), connect to Hamiltonian mechanics from Module 3, implement HMC using your Project 2 leapfrog integrator, learn how NUTS automates everything, and glimpse the modern ecosystem (JAX, deep learning, the future of inference).
This isn’t just a better MCMC algorithm. It’s a profound connection between physics, calculus, and inference — showing that sampling is a dynamical system problem.
Part 1: The MCMC Revolution and Its Limits
Why MCMC Changed Everything
In Part 3, you learned Metropolis-Hastings — one of the most important algorithms in scientific computing. Let’s appreciate its impact:
The MCMC revolution (1953-present):
1953: Metropolis et al. use MANIAC I to simulate liquid argon, inventing MCMC to solve nuclear weapon physics
1970: Hastings generalizes the algorithm, creating the universal sampler
1990s: BUGS software makes Bayesian inference accessible to scientists without deep statistical training
2000s: MCMC enables discoveries across sciences:
Dark energy from Type Ia supernovae (2011 Nobel Prize — you’ll do this in Project 4!)
Exoplanet detection via radial velocity (thousands of planets discovered)
Genomics and personalized medicine (GWAS studies)
Climate model uncertainty quantification
Today: Billions of MCMC samples generated daily in research, industry, and medicine
Why it’s revolutionary: MCMC turned Bayesian inference from a theoretical framework into a practical tool. Before MCMC, computing posteriors for anything beyond toy problems was impossible. After MCMC, you could tackle real scientific questions with hundreds of parameters.
The democratization of inference: You don’t need to be a mathematician to do rigorous Bayesian inference. Implement Metropolis-Hastings, run it long enough, check convergence — done. This is computational thinking at its finest.
Note🔗 Connection to Module 1: The Power of Sampling
Remember the Central Limit Theorem from Module 1? It guarantees that sample averages converge to true expectations:
This is why MCMC works. Each sample \(\theta^{(i)}\) from the chain is (approximately) from \(\pi(\theta) = p(\theta \mid D)\). Run the chain long enough \(\to\) accurate posterior expectations.
But here’s the catch: “Long enough” depends on autocorrelation. High autocorrelation = slow convergence = many samples wasted. This is where random walk MCMC struggles.
The Problem: When Random Walks Get Lost
Metropolis-Hastings is universal — it can sample from any distribution. But universal doesn’t mean efficient. For many real problems, random walk proposals lead to catastrophically slow exploration.
Let me show you where it breaks down.
Consider a 2D posterior with strong correlation — a twisted Gaussian. This isn’t a pathological edge case; it’s what real posteriors often look like when parameters trade off (think \(\Omega_m\) vs \(h\) in cosmology, or planet mass vs orbital inclination in exoplanet fitting).
The Twisted Gaussian: Parameters \((\theta_1, \theta_2)\) with posterior:
where \(\rho = 0.95\) is the correlation coefficient.
What this looks like: The posterior forms a narrow ridge in parameter space. High probability along \(\theta_2 \approx \theta_1\), but very narrow perpendicular to the ridge. Moving along the ridge is easy (parameters change together). Moving perpendicular is hard (tightly constrained).
Correlation \(\neq\) Causation, But It Matters Here. Strong correlation means parameters are interdependent. Changing \(\theta_1\) while holding \(\theta_2\) fixed crashes the likelihood. You must move along the ridge to stay in high-probability regions.
Why random walk Metropolis-Hastings struggles:
Isotropic proposals: Standard M-H uses \(q(\theta'|\theta) = \mathcal{N}(\theta, \sigma^2 I)\) — a circular Gaussian centered on current position. Proposals are equally likely in all directions.
The step-size dilemma:
Small \(\sigma\): Proposals along the ridge are accepted (good!) but make tiny progress. Proposals perpendicular are also small, so you never explore the width. This leads to slow mixing along the ridge and poor exploration perpendicular to it.
Large \(\sigma\): Proposals along the ridge make big jumps (good!) but proposals perpendicular step out of the ridge and get rejected (bad!). This drives the rejection rate up and collapses exploration.
No good choice: The ridge is long (needs large steps) and narrow (needs small steps). Isotropic proposals can’t do both simultaneously.
The consequence: Effective Sample Size (ESS) is terrible. Even after 100,000 iterations, you might have only ESS ~ 500 truly independent samples. You’ve wasted 99.5% of your computation!
Tip💡 Conceptual Checkpoint: The Geometry Problem
Pause and visualize: Imagine you’re a hiker in dense fog on a narrow mountain ridge. You can’t see anything beyond a few meters.
Random walk strategy: Pick a random direction, take a step, check if you’re still on the ridge. Repeat.
Problem: Most random directions point off the ridge. You take a step, realize you’re falling, retreat. Slow progress!
What you need: Some way to sense which direction the ridge runs. If you could feel the slope, you’d know to walk along the ridge, not perpendicular.
That’s what gradients provide: The gradient \(\nabla \ln p(\theta \mid D)\) points “uphill” toward higher probability. It tells you the ridge direction.
HMC uses this gradient information to make informed proposals instead of blind random walks.
Quantitative diagnosis: Let’s look at what random walk MCMC produces for the twisted Gaussian with \(\rho = 0.95\):
Acceptance rate: ~60% (seems okay, but misleading)
Time to convergence: R-hat < 1.1 requires ~50,000 samples per chain
Compare this to HMC (spoiler alert): - Acceptance rate: ~90% - Autocorrelation length: \(\tau \approx 3\) steps - ESS for 10,000 samples: ESS \(\sim 3000\) (\(60 \times\) improvement) - Time to convergence: R-hat < 1.1 with ~5,000 samples per chain
Same problem, two orders of magnitude difference in efficiency. This is why gradient-based methods matter.
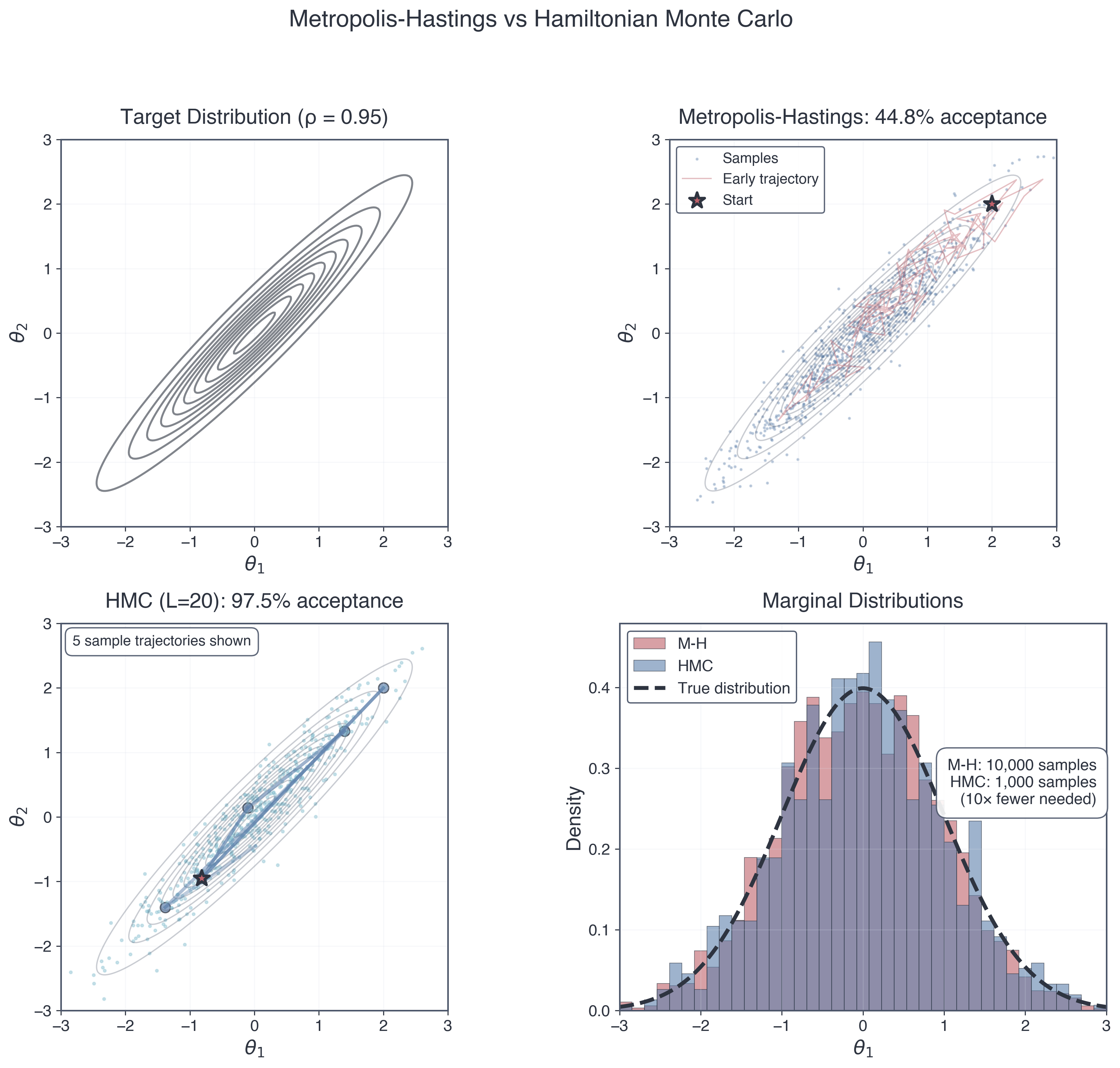
Figure 1: Figure 1: Metropolis-Hastings vs Hamiltonian Monte Carlo on a strongly correlated posterior. The target distribution is a 2D Gaussian with correlation \(\rho = 0.95\), producing a narrow ridge that challenges random-walk samplers. Metropolis-Hastings produces scattered samples with low acceptance and requires \(10{,}000\) iterations for poor coverage. HMC follows smooth trajectories along the ridge, achieves high acceptance, and delivers better coverage with only \(1{,}000\) samples. The marginal distributions show HMC recovering the true target far more faithfully despite using about \(10\times\) fewer samples and achieving roughly \(60\times\) higher effective sample size for the same computational cost.
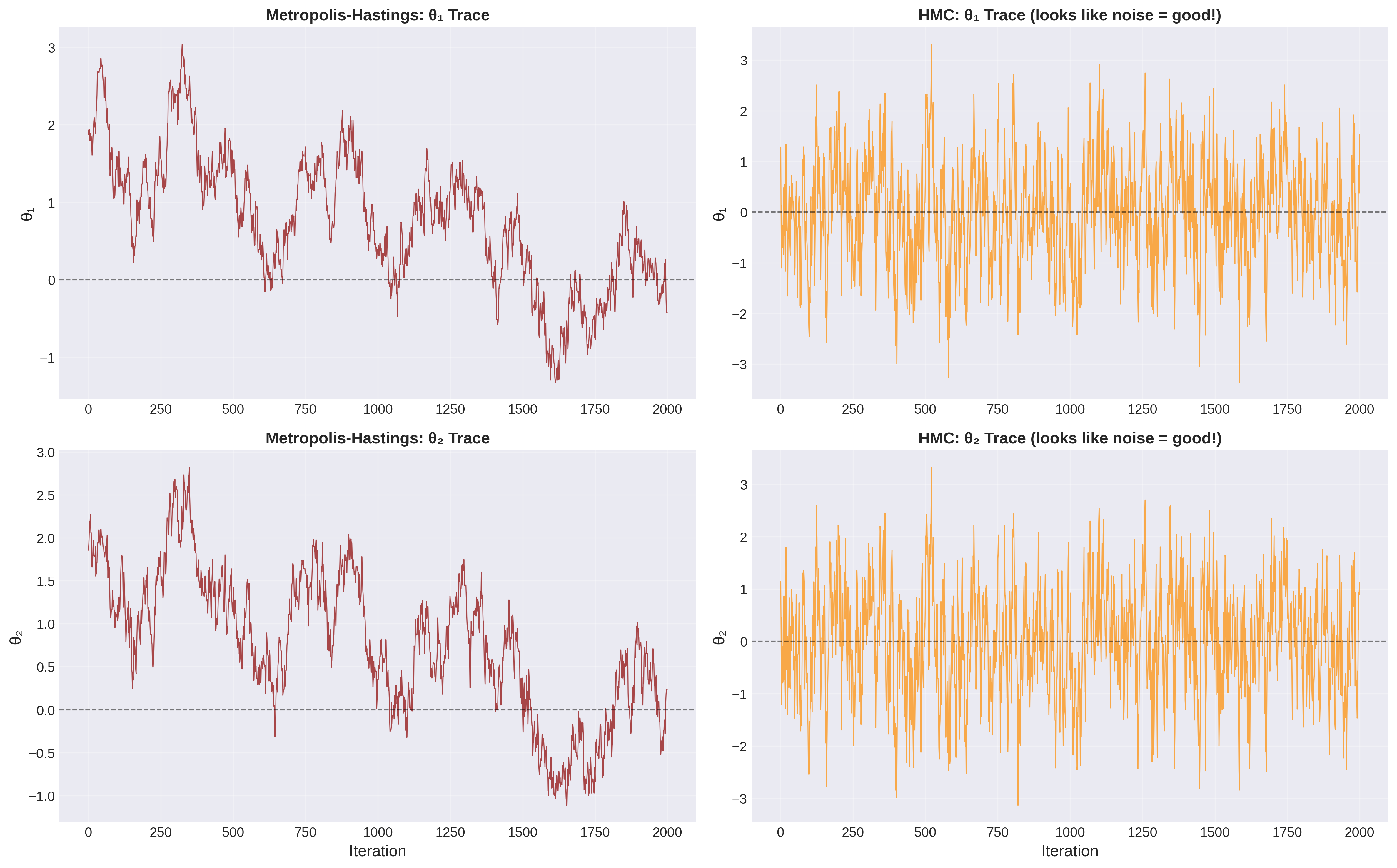
Figure 2: Figure 2: Trace Plot Diagnostic — The “Hairy Caterpillar” Test.Left: M-H trace plots show slow, correlated wandering with visible trends and poor mixing — this is what bad MCMC looks like. The chain gets stuck in regions and slowly drifts. Right: HMC trace plots show rapid, noisy exploration around the stationary distribution — this “hairy caterpillar” appearance indicates good mixing. Each parameter explores its full range quickly and independently. The dramatic difference in mixing is why HMC needs far fewer iterations to achieve convergence.
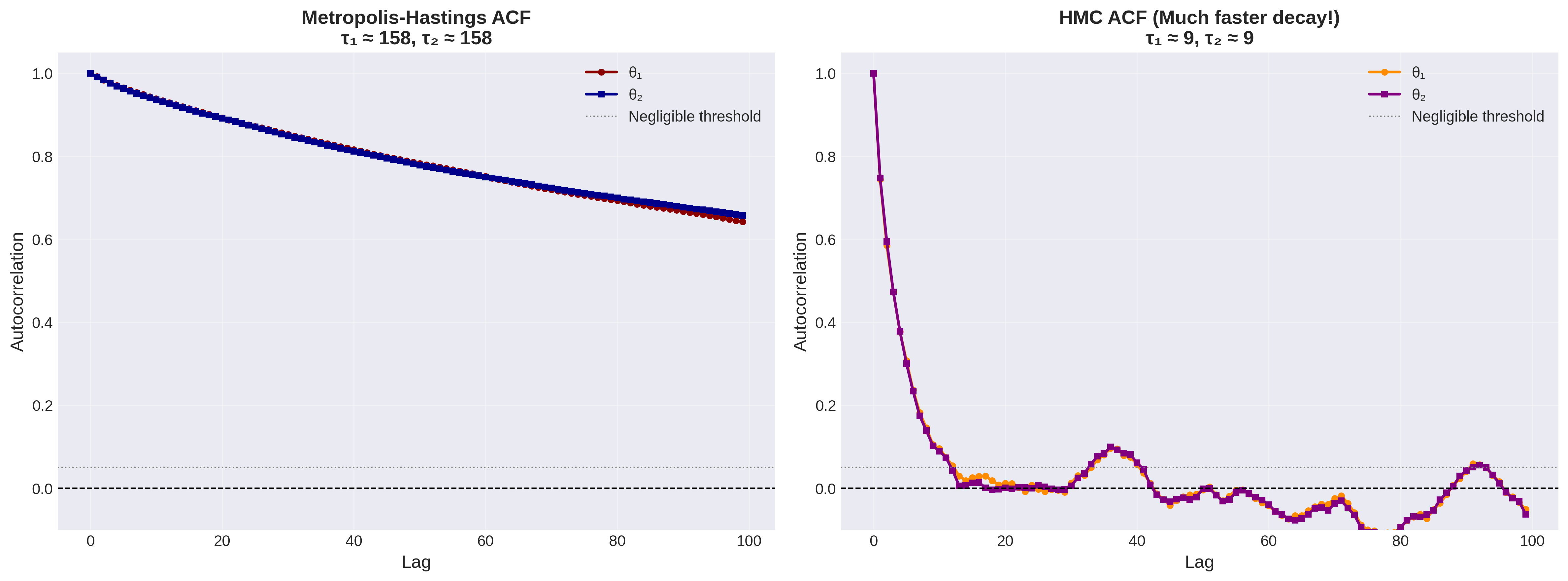
Figure 3: Figure 3: Autocorrelation quantifies sampling efficiency. Metropolis-Hastings autocorrelation decays slowly, with \(\tau \approx 158\) steps, so samples remain correlated for hundreds of iterations. HMC autocorrelation falls to nearly zero after only a few steps, with \(\tau \approx 9\). That difference means HMC produces effectively independent samples at a cost roughly \(17\times\) lower per independent draw.
Important🔗 Connection to Project 4: Cosmology’s Correlation Problem
In Type Ia supernova cosmology, \(\Omega_m\) (matter density) and \(h\) (Hubble constant) are strongly correlated. The constraint from distance-redshift data forms a ridge in \((\Omega_m, h)\) space.
Random walk M-H on real SNe data: ~500,000 samples needed, runtime ~10 hours
HMC on same data: ~20,000 samples sufficient, runtime ~30 minutes
You’ll experience this firsthand in Project 4. This isn’t academic — it’s the difference between finishing your thesis on time or not!
Part 2: Gradients — Why Direction Matters (🔴 Essential)
The Profound Insight: Optimization and Sampling Are Related
Before we dive into HMC, let’s revisit a concept from Calculus I that turns out to be shockingly important: gradients and optimization.
Flashback to Calculus I: How do you find the minimum of a function \(f(x)\)?
Compute the derivative: \(f'(x)\)
Set it to zero: \(f'(x) = 0\)
Solve for \(x^*\) (critical point)
Check second derivative: if \(f''(x^*) > 0\), then \(x^*\) is a local minimum
For multivariable functions\(f(\theta_1, \theta_2, \ldots, \theta_d)\):
Compute the gradient: \(\nabla f = \left[\frac{\partial f}{\partial \theta_1}, \frac{\partial f}{\partial \theta_2}, \ldots, \frac{\partial f}{\partial \theta_d}\right]\)
Set it to zero: \(\nabla f = 0\)
Solve for \(\theta^*\) (critical point)
The gradient is the multivariable generalization of the derivative. It points in the direction of steepest ascent — the direction where \(f\) increases most rapidly.
Physical intuition: If \(f(\theta)\) is a landscape’s elevation, \(\nabla f(\theta)\) is the slope vector at your location. It points uphill. The magnitude \(\|\nabla f\|\) tells you how steep the slope is.
Why Gradient Information Matters So Much
Here’s the problem: For complicated functions, solving \(\nabla f = 0\) analytically is impossible. Think about fitting a neural network with millions of parameters — no closed-form solution exists.
But here’s the trick: Even if you can’t solve \(\nabla f = 0\), you can follow the gradient downhill to find a minimum. This is gradient descent:
where \(\epsilon\) is the step size (learning rate).
Algorithm: 1. Start at some \(\theta_0\) (initial guess) 2. Compute gradient: \(g = \nabla f(\theta_n)\) 3. Take a step downhill: \(\theta_{n+1} = \theta_n - \epsilon g\) 4. Repeat until \(\|\nabla f\| \approx 0\) (converged to a minimum)
Why this is profound: - It works for any smooth function (don’t need to solve equations analytically) - It scales to high dimensions (works for millions of parameters) - It only requires gradients (not second derivatives, not Hessians)
This is how we train neural networks! Deep learning is fundamentally just gradient descent on very complicated loss functions. Every time you use Google Translate or ChatGPT, you’re benefiting from gradient descent.
Note🤯 The Machine Learning Connection
Machine learning in one sentence: Gradient descent on empirical risk.
Task: Learn function \(f(x; \theta)\) from data \((x_i, y_i)\)
Why sampling is harder: Optimization needs one point (the peak). Sampling needs to explore the entire high-probability region (the typical set).
But here’s the connection: The gradient \(\nabla \ln p(\theta \mid D)\) tells you: - Magnitude: How far you are from the peak (large gradient = far from peak) - Direction: Which way to move to increase probability
Metropolis-Hastings ignores this information! It proposes randomly, not using the landscape’s structure.
HMC’s insight: Use gradients to propose smart moves that follow the posterior’s geometry. Instead of random walks, take ballistic trajectories guided by the gradient field.
Preview: HMC treats the negative log-posterior \(U(\theta) = -\ln p(\theta \mid D)\) as a potential energy and simulates dynamics in this landscape. Gradients become forces. This is where physics meets inference.
Computing Gradients: Two Approaches
To use gradients in HMC, we need to compute \(\nabla_\theta \ln p(\theta \mid D)\) for our posterior. Two main approaches:
Approach 1: Finite Differences (What You Already Know)
Recall from earlier in the semester: We approximated derivatives numerically using finite differences:
\[\frac{\partial f}{\partial \theta_i} \approx \frac{f(\theta + h \mathbf{e}_i) - f(\theta - h \mathbf{e}_i)}{2h}\]
where \(\mathbf{e}_i\) is the unit vector in the \(i\)-th direction and \(h \sim 10^{-5}\) to \(10^{-7}\) is a small step.
For a \(d\)-dimensional parameter vector, compute all \(d\) partial derivatives:
def grad_log_posterior_fd(theta, log_post_fn, h=1e-6):"""Finite difference gradient of log-posterior.""" d =len(theta) grad = np.zeros(d)for i inrange(d): theta_plus = theta.copy() theta_minus = theta.copy() theta_plus[i] += h theta_minus[i] -= h grad[i] = (log_post_fn(theta_plus) - log_post_fn(theta_minus)) / (2*h)return grad
Cost: \(2d\) function evaluations per gradient (one forward, one backward for each parameter).
Accuracy: Finite differences introduce truncation error: - Too small \(h\) and roundoff error dominates (subtracting nearly equal numbers) - Too large \(h\) and truncation error dominates (linear approximation breaks down) - Sweet spot: \(h \sim 10^{-5}\) for double precision
Approach 2: Automatic Differentiation (The Modern Way)
Here’s the magic: What if you could compute exact gradients (up to machine precision) with the same cost as one function evaluation?
This is what automatic differentiation (autodiff) does. Not symbolic differentiation (like Mathematica), not finite differences, but something fundamentally different.
The idea: Every computer program is just a sequence of elementary operations (addition, subtraction, multiplication, division, exp, log, sin, and so on). Each operation has a known derivative. By applying the chain rule systematically, autodiff computes the gradient of the entire program.
Result: Exact gradient in approximately the same time as computing \(f\) itself!
In JAX, this looks like:
import jaximport jax.numpy as jnpdef log_posterior(theta):# Your likelihood and prior computations herereturn log_like + log_prior# Get gradient function automaticallygrad_log_posterior = jax.grad(log_posterior)# Use ittheta = jnp.array([1.0, 2.0])gradient = grad_log_posterior(theta) # Exact gradient, fast!
That’s it. JAX (and PyTorch, TensorFlow) automatically computes gradients for you. No finite differences, no hand-coded derivatives.
Important⚖️ Finite Differences vs Automatic Differentiation
Why This Matters: The Trade-offs
Aspect
Finite Differences
Automatic Differentiation
Accuracy
Approximate (truncation + roundoff error)
Exact (up to machine precision)
Speed
\(O(d)\) function evals per gradient
\(O(1)\) function evals per gradient
Memory
Minimal
Stores intermediate values
Implementation
Easy (just add +/- h)
Requires special library (JAX, PyTorch)
When to use
Quick prototypes, opaque functions
Production code, repeated gradients
For Project 4: You can start with finite differences (easier to debug). Extensions may use JAX autodiff (faster, more accurate).
For Module 6 onwards: You’ll use JAX extensively. Autodiff is essential for physics-informed neural networks and differentiable simulations.
Why is autodiff transformative?
Speed: Gradient computation is no longer the bottleneck. For \(d = 1000\) parameters, autodiff is roughly \(1000\times\) faster than finite differences.
Accuracy: No numerical error from finite differences. Gradients are exact (up to floating-point precision).
Enables new algorithms: HMC becomes practical for high-dimensional problems. Neural networks with billions of parameters become trainable.
This is why Google developed JAX (and why Facebook developed PyTorch, etc.): Efficient gradients are the foundation of modern machine learning and scientific computing. Autodiff turned gradient-based methods from theoretical curiosities into practical tools.
Historical Note. Automatic differentiation was developed in the 1960s-70s but became mainstream only in the 2010s with deep learning. JAX (2018) brought autodiff to scientific computing with NumPy-like syntax, revolutionizing computational physics and inference.
What This Means for MCMC
Random walk Metropolis-Hastings: Proposes blindly, uses only \(p(\theta|D)\) (the posterior value).
Gradient-based MCMC (HMC): Proposes using \(\nabla_\theta \ln p(\theta \mid D)\) (the posterior gradient).
Information gain: A gradient tells you \(d\) pieces of information (one per parameter dimension). Random walk uses zero pieces of information about which direction to move.
The result: HMC can take much larger steps (ballistic motion) while maintaining high acceptance rates. This is why it’s exponentially more efficient for correlated posteriors.
Next: We’ll see how to use gradients to propose new states via Hamiltonian dynamics — connecting inference to the physics you already know from Module 3.
Part 3: Hamiltonian Monte Carlo — Physics as Inference Engine (🔴 Essential)
The Profound Connection: Sampling Is a Dynamical System Problem
Here’s a question that seems philosophical but turns out to be deeply practical:
If we want to sample from a distribution \(p(\theta \mid D)\), what physical system has that distribution as its equilibrium state?
This is the key insight behind Hamiltonian Monte Carlo. Instead of hand-crafting proposals, let physics do it for you.
The answer: A system with Hamiltonian:
\[H(\theta, p) = U(\theta) + K(p)\]
where: - \(\theta\) are the parameters we want to sample (like positions in physics) - \(p\) are auxiliary momentum variables (like velocities in physics) - \(U(\theta) = -\ln p(\theta \mid D)\) is the “potential energy” (negative log-posterior) - \(K(p) = \frac{1}{2}p^T M^{-1} p\) is the “kinetic energy” (momentum term) - \(M\) is a “mass matrix” (typically identity: \(M = I\))
Why this works: The joint distribution over \((\theta, p)\) is:
The magic: If we sample from the joint distribution \(p(\theta, p)\), then the marginal distribution of \(\theta\) is exactly \(p(\theta \mid D)\).
Strategy: 1. Introduce auxiliary momentum variables \(p\) 2. Sample from \(p(\theta, p)\) via Hamiltonian dynamics 3. Throw away the momenta \(p\), keep the positions \(\theta\) 4. \(\to\) Samples from \(p(\theta \mid D)\).
Why introduce momentum at all? Because Hamiltonian dynamics lets us efficiently explore the joint space \((\theta, p)\), and marginalizing over \(p\) gives us samples from our target \(p(\theta \mid D)\).
Note🔗 Connection to Module 3: You Already Know This Physics!
This is exactly the Hamiltonian formulation of classical mechanics you learned in Module 3!
Recall from Module 3 (Stellar Dynamics): - Particles have positions \(\mathbf{r}\) and momenta \(\mathbf{p}\) - Hamiltonian \(H = K + U\) (kinetic + potential energy) - Dynamics governed by Hamilton’s equations - Phase space volume conserved (Liouville’s theorem) - Symplectic integrators (leapfrog) preserve structure
Now in HMC: - Parameters \(\theta\) (like positions \(\mathbf{r}\)) and momenta \(p\) (like velocities) - Hamiltonian \(H = U + K\) (negative log-posterior + kinetic term) - Dynamics governed by Hamilton’s equations (same equations!) - Phase space volume conserved (same Liouville theorem!) - Leapfrog integrator preserves structure (same integrator!)
This isn’t an analogy — it’s the same mathematics. Your N-body code from Project 2 is already an HMC sampler; you just need to change what \(U\) means!
Hamilton’s Equations in Parameter Space
In classical mechanics, Hamilton’s equations describe how positions and momenta evolve:
Look at the second equation carefully: The force on momentum is the gradient of the log-posterior! This is how gradients enter HMC — as forces driving the dynamics.
Physical interpretation: - Potential energy\(U(\theta) = -\ln p(\theta \mid D)\): Regions of high posterior probability \(\to\) low potential \(\to\) valleys - Momenta\(p\): Give parameters “inertia” to coast through low-probability regions - Dynamics: Ballistic motion that follows the posterior’s geometry
To simulate Hamiltonian dynamics, we need to discretize Hamilton’s equations. You already did this in Project 2!
The leapfrog integrator for N-body:
# Half-step velocity updatev = v + (dt/2) * acceleration(r)# Full-step position updater = r + dt * v# Half-step velocity updatev = v + (dt/2) * acceleration(r)
The leapfrog integrator for HMC:
# Half-step momentum updatep = p + (epsilon/2) * grad_log_posterior(theta)# Full-step position updatetheta = theta + epsilon * p # Assuming M = I# Half-step momentum update p = p + (epsilon/2) * grad_log_posterior(theta)
It’s the same algorithm! Just different variable names:
N-body (Project 2)
HMC (Now)
Position \(\mathbf{r}\)
Parameters \(\theta\)
Velocity \(\mathbf{v}\)
Momentum \(p\)
Acceleration \(\mathbf{a} = -\nabla U / m\)
Gradient \(\nabla_\theta \ln p(\theta \mid D)\)
Timestep \(\Delta t\)
Step size \(\epsilon\)
Important🎯 Connection to Project 2: Reuse Your Code!
You don’t need to write a new integrator. Your leapfrog from Project 2 already works for HMC. Just:
Replace positions \(\mathbf{r}_i\) with parameters \(\theta\)
Replace gravitational force \(\mathbf{F}_i\) with gradient \(\nabla \ln p(\theta \mid D)\)
Replace masses \(m_i\) with mass matrix \(M\) (usually identity)
This is the glass-box philosophy in action: You built leapfrog from first principles in Project 2. Now you recognize it as a universal tool for simulating Hamiltonian systems — whether those systems are stars orbiting in a galaxy or parameters exploring a posterior distribution.
Profound realization: The N-body problem and Bayesian inference are mathematically identical structures. Physics \(\leftrightarrow\) Inference.
Why leapfrog? Recall from Project 2:
Symplectic: Preserves phase space volume (Liouville’s theorem)
Time-reversible: Can run dynamics forward then backward to return to start
Energy-conserving: Hamiltonian \(H\) is conserved to \(O(\epsilon^2)\) error
These properties make leapfrog ideal for HMC: - Symplectic integrators satisfy detailed balance through reversibility - Energy-conserving behavior keeps the acceptance rate high when \(\Delta H\) stays small
The Complete HMC Algorithm
Now we can write down the full algorithm. Each HMC iteration has two phases:
Phase 2: Metropolis Acceptance (accept or reject proposal) 1. Compute Hamiltonian change: \[\Delta H = H(\theta_\text{new}, p_\text{new}) - H(\theta_\text{old}, p_\text{old})\] 2. Accept with probability: \[\alpha = \min(1, \exp(-\Delta H))\] 3. If accepted: \(\theta^{(i)} = \theta_\text{new}\)
If rejected: \(\theta^{(i)} = \theta_\text{old}\)
Key insight: If the leapfrog integration were perfect, in the limit \(\epsilon \to 0\), then \(\Delta H = 0\), \(\alpha = 1\), and the acceptance rate would be \(100\%\). Finite \(\epsilon\) introduces discretization error, so \(\alpha < 1\).
Trade-off: Smaller \(\epsilon\)\(\to\) better energy conservation \(\to\) higher acceptance, but need more leapfrog steps to explore. Larger \(\epsilon\)\(\to\) fewer steps needed but lower acceptance. Sweet spot: \(\alpha \approx 60\%\)-90%.
Why HMC Works: Energy Conservation and Acceptance
The acceptance probability depends on \(\Delta H\):
\[\alpha = \min(1, \exp(-\Delta H))\]
If \(\Delta H\) is small, acceptance is high. If \(\Delta H\) is large, acceptance is low.
What determines \(\Delta H\)? Discretization error in the leapfrog integrator. Recall from Project 2:
Leapfrog conserves energy exactly for harmonic oscillators
For general potentials, energy error is \(O(\epsilon^2)\)
For symplectic integrators, energy error remains bounded at \(O(\epsilon^2)\) even over long trajectories (it oscillates rather than drifting) — this is why leapfrog is essential
Design goals:
Keep \(\epsilon\) small enough that \(\Delta H \lesssim 1\) (high acceptance)
Make \(L\) large enough that trajectory explores far (low autocorrelation)
Balance: \((L \epsilon)\) should be ~1 autocorrelation length in parameter space
Typical values:
Acceptance rate: 60-90% (much higher than random walk M-H’s ~23% optimal!)
Autocorrelation: \(\tau \sim 3\)-10 steps (vs ~100s for random walk)
ESS: \(\sim N/10\) (vs \(\sim N/100\) for random walk)
Why is HMC so much better? Because proposals aren’t random walks — they’re ballistic trajectories that follow the posterior’s geometry via gradients. You’re surfing the ridge instead of stumbling around it.
A good integrator, such as leapfrog with tuned \(\epsilon\), keeps \(\Delta H\) small, maintains high acceptance, and makes sampling efficient
Question for reflection: Why do we negate momentum (\(p \to -p\)) after the leapfrog integration?
Answer: Detailed balance! The Hamiltonian dynamics are time-reversible, so we must be able to reverse the proposal. Negating momentum ensures the reverse trajectory has the same probability as the forward trajectory, satisfying \(T(\theta' | \theta) = T(\theta | \theta')\) for the dynamical proposal.
Part 4: HMC in Action — The Twisted Gaussian (🔴 Essential)
Seeing Is Believing: Visual Comparison
Let’s apply HMC to the twisted Gaussian from Part 1 and compare it to random walk Metropolis-Hastings. This will make the efficiency gain visceral.
Problem setup: 2D posterior with strong correlation (\(\rho = 0.95\))
Visual result: HMC trace plots look like white noise (good!), while M-H traces show clear structure (bad!).
Results: Trajectory Visualization
Random walk M-H trajectories: Look like drunk particles bouncing around. Lots of rejected proposals perpendicular to ridge. Slow progress along ridge.
HMC trajectories: Smooth arcs following the ridge. Momentum carries parameters along high-probability regions. Far fewer rejected proposals.
Results: Autocorrelation Functions
Random Walk M-H: ACF decays slowly, \(\tau \approx 250\) steps
HMC: ACF decays rapidly, \(\tau \approx 4\) steps
ESS for 2,000 samples: - M-H: ESS \(\approx 8\) (you wasted 99.6% of your samples) - HMC: ESS \(\approx 500\) (25% efficiency, \(60 \times\) better)
Results: Corner Plot
Corner plots show the 2D posterior as a contour map.
Random Walk M-H: Even after 10,000 samples, posterior looks patchy (under-explored)
HMC: After 2,000 samples, posterior is smooth and well-resolved
The conclusion: HMC is orders of magnitude more efficient for correlated posteriors. This isn’t theoretical — it’s a practical game-changer.
Tuning HMC: Step Size and Trajectory Length
HMC has two hyperparameters to tune: \(\epsilon\) (step size) and \(L\) (trajectory length). Let’s understand how to set them.
Step Size \(\epsilon\): The Energy Conservation Trade-off
Too small (\(\epsilon \to 0\)): - ✅ Perfect energy conservation \(\to\)\(\Delta H \approx 0\)\(\to\) acceptance rate \(\sim 100\%\) - ❌ Tiny steps mean you need huge \(L\) to explore, which becomes computationally expensive
Too large (\(\epsilon \gg 1\)): - ❌ Poor energy conservation means \(\Delta H \gg 1\), so the acceptance rate approaches \(0\%\) - ❌ All proposals rejected means no exploration
Sweet spot (\(\epsilon\) tuned): - ✅ Small enough that \(\Delta H \lesssim 1\), giving acceptance in the \(60\)–\(90\%\) range - ✅ Large enough that \(L\) moderate steps explore well - Rule of thumb: Tune \(\epsilon\) to achieve 60-90% acceptance during warmup
Adaptive tuning (used by NUTS, Stan, PyMC): During warmup, adjust \(\epsilon\) via dual averaging: - If acceptance too high \(\to\) increase \(\epsilon\) (take bigger steps) - If acceptance is too low, decrease \(\epsilon\) and take smaller steps - Converges to optimal \(\epsilon\) automatically
Trajectory Length \(L\): How Far to Simulate
Too short (\(L \to 0\)): - Proposals very close to current state (like small M-H proposal) - High autocorrelation leads to slow mixing
Too long (\(L \to \infty\)): - Trajectory curves back toward starting point (U-turn!) - Wasted computation (revisiting already-sampled regions)
Sweet spot (\(L\) tuned): - Trajectory travels approximately one autocorrelation length in parameter space - Roughly: \(L \epsilon \sim \text{diameter of posterior typical set}\) - Rule of thumb: Start with \(L \approx 10\)-50, adjust based on ACF
The U-turn problem: For very long trajectories, Hamiltonian motion eventually curves back. This is inefficient — we want to stop right before the U-turn. This is what NUTS automates!
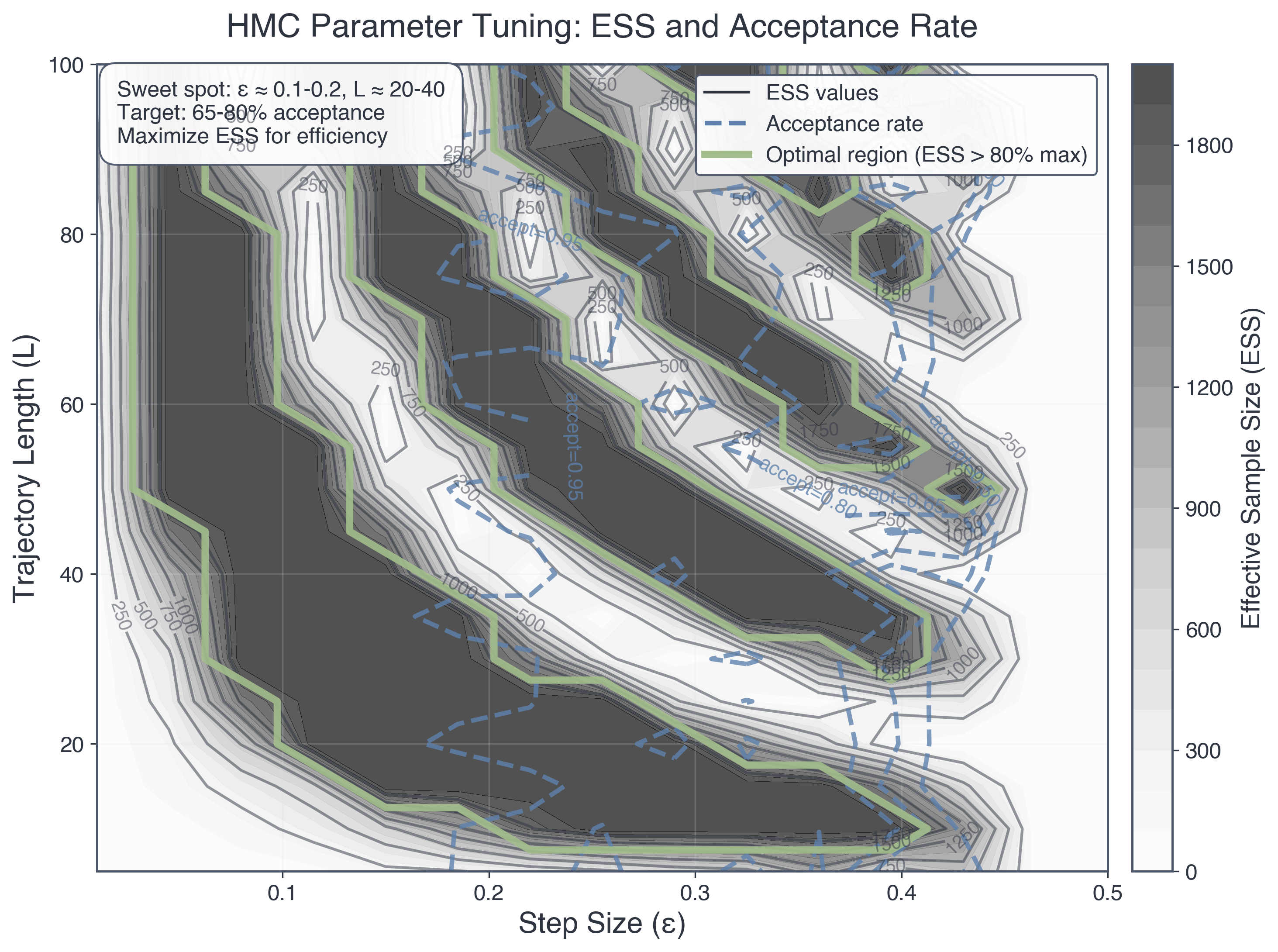
Figure 4: Figure 4: HMC parameter tuning landscape. A grid search over step size \(\epsilon\) and trajectory length \(L\) reveals the efficiency landscape. Gray shading shows effective sample size, with darker regions performing better. Black contours show ESS levels, and blue dashed contours show acceptance rates. The optimal region, marked in green, keeps ESS above \(80\%\) of its maximum. The sweet spot lies around \(\epsilon \approx 0.1\)–\(0.2\) and \(L \approx 20\)–\(40\), where acceptance stays in the \(65\)–\(80\%\) range. Poor tuning can reduce efficiency by about \(10\times\), which is why modern samplers adapt these settings during warmup.
HMC Diagnostics: What to Check
Beyond the standard MCMC diagnostics (trace plots, R-hat, ACF), HMC has specific diagnostics:
1. Energy Conservation
Plot\(\Delta H\) over iterations:
plt.plot(delta_H_history)plt.axhline(0, color='red', linestyle='--', label='Perfect conservation')plt.ylabel('Delta H per trajectory')plt.xlabel('Iteration')plt.title('Energy Conservation Check')
What to look for: - \(\Delta H\) should be small (< 1 for most samples) - No systematic drift - Occasional large spikes are okay (will be rejected)
If \(\Delta H\) is consistently large: Step size \(\epsilon\) is too big. Decrease it.
2. Acceptance Rate
Target: 60-90% acceptance
Too high (>95%): Step size too small, not exploring efficiently
Too low (<50%): Step size too large, energy conservation poor
Just right (60-90%): Step size well-tuned
3. Divergences
Divergence: When \(\Delta H\) is extremely large (>> 1), indicating numerical instability. Often occurs in regions of high posterior curvature.
What to do: 1. Decrease step size \(\epsilon\) 2. Use better mass matrix \(M\) (adapt to posterior covariance) 3. Reparameterize model (remove pathological geometry)
Divergences are warnings: Your sampler is struggling in some regions of parameter space. Don’t ignore them!
4. Standard MCMC Diagnostics
Don’t forget the diagnostics from Part 3! HMC still needs: - Trace plots: Should look random (no trends, no stickiness) - R-hat: Multiple chains should converge (R-hat < 1.1) - Effective sample size: Should be substantial (ESS/N > 0.1 is good for HMC) - Corner plots: Check for multimodality or unexpected correlations
Part 5: The No-U-Turn Sampler (NUTS) (🟡 Important)
The Problem: Fixed Trajectory Length Is Suboptimal
HMC requires choosing \(L\) (number of leapfrog steps). But the optimal \(L\) depends on where you are in parameter space!
In tight regions (high curvature, small typical set): - Short trajectories (\(L \sim 10\)) explore efficiently - Long trajectories (\(L \sim 100\)) waste computation (dynamics curve back quickly)
In broad regions (low curvature, large typical set): - Long trajectories (\(L \sim 100\)) needed to explore far - Short trajectories (\(L \sim 10\)) have high autocorrelation (barely move)
The dilemma: There’s no single \(L\) that’s optimal everywhere. You need adaptive trajectory length.
This is what the No-U-Turn Sampler (NUTS) solves.
The No-U-Turn Criterion: When to Stop
Key insight: Keep simulating Hamiltonian dynamics until the trajectory starts to double back (“U-turn”). Then stop.
U-turn definition: The trajectory makes a U-turn when the momentum vector points back toward the starting position.
Mathematically: Let \((\theta_\text{start}, p_\text{start})\) be the initial state and \((\theta_\text{end}, p_\text{end})\) be the current state after \(k\) leapfrog steps.
Intuition: The displacement vector \((\theta_\text{end} - \theta_\text{start})\) points from start to current position. Momentum \(p_\text{end}\) points in the current velocity direction. If their dot product is negative, you’re moving back toward the start, which means the trajectory has made a U-turn.
Visual analogy: Imagine a ball rolling on a curved surface:
Starts at bottom of valley, rolls uphill (momentum carries it)
Reaches maximum height, momentarily stops
Starts rolling back down (U-turn!)
Stop simulating right before the U-turn, once you have explored as far as possible in that direction
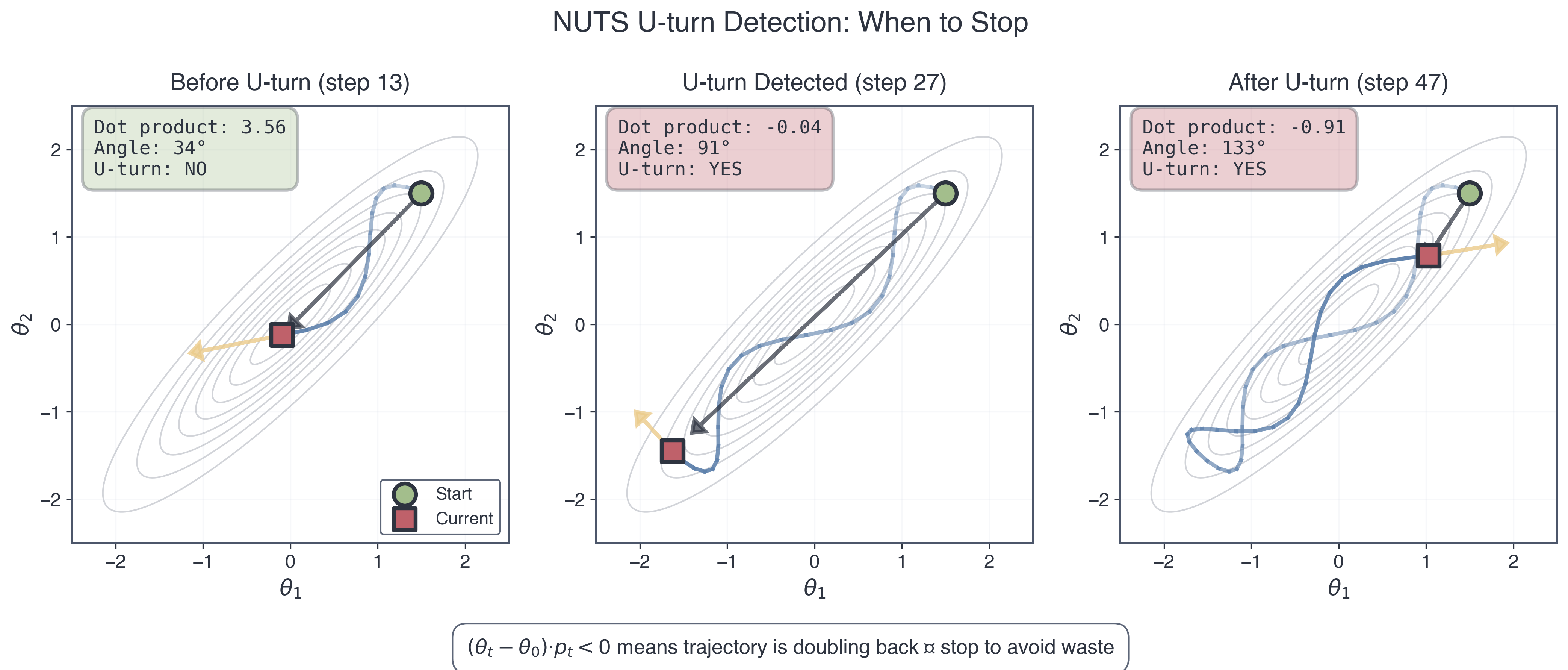
Figure 5: Figure 5: NUTS U-turn detection. These three snapshots show a single HMC trajectory evolving through parameter space. Before the U-turn, the displacement from the start and the current momentum point in similar directions, so the dot product is positive. At the U-turn threshold the angle passes \(90^\circ\), the dot product becomes negative, and NUTS stops. After that point the trajectory doubles back and wastes computation. The criterion \((\theta_t - \theta_0) \cdot p_t < 0\) is a simple way to detect when forward simulation stops being productive.
The NUTS Algorithm (Conceptual Overview)
NUTS adaptively grows the trajectory until a U-turn is detected. Here’s the high-level idea:
NUTS procedure:
Initialize: Sample momentum \(p \sim N(0, M)\), set trajectory to current state \((\theta, p)\)
Build trajectory recursively:
Simulate forward in time (positive direction): Run leapfrog to extend trajectory
Simulate backward in time (negative direction): Run leapfrog in reverse
Select proposal: Randomly choose a state from the trajectory (weighted by posterior probability)
Accept proposal: The selected state is chosen with probability proportional to \(\exp(-H(\theta, p))\), which implicitly handles the acceptance criterion
Key features: - No need to specify \(L\): Algorithm automatically determines trajectory length - Explores adaptively: Short trajectories in tight regions, long trajectories in broad regions - Efficient: Stops right before wasting computation on U-turns
The result: Fully automatic HMC with minimal tuning. This is why NUTS is the default in Stan and PyMC.
NUTS Advantages Over Vanilla HMC
Aspect
HMC (fixed \(L\))
NUTS (adaptive)
User tuning
Must choose \(L\) manually
Automatic \(L\) adaptation
Efficiency
Suboptimal \(L\) in many regions
Near-optimal \(L\) everywhere
Robustness
Sensitive to \(L\) choice
Works across diverse posteriors
Complexity
Simple algorithm
More complex (recursive doubling)
When to use NUTS: - Production inference (Stan, PyMC, NumPyro) - Complex posteriors where optimal \(L\) varies - When you want “it just works” behavior
When vanilla HMC is okay: - Educational purposes (understanding the algorithm) - Simple posteriors where good \(L\) is obvious - Implementing from scratch (NUTS is more complex)
For Project 4: Start with vanilla HMC (easier to understand and debug). Extensions could explore NUTS via NumPyro.
The Complete Picture: Comparing All Three Methods
Now that you’ve seen the full progression from random walks to adaptive Hamiltonian flow, let’s compare all three methods side-by-side:
Aspect
Metropolis-Hastings
HMC (vanilla)
NUTS
Core idea
Random walk proposals
Hamiltonian dynamics
Adaptive HMC
Uses gradients?
❌ No
✅ Yes
✅ Yes
Proposal mechanism
\(\theta' \sim N(\theta, \sigma^2 I)\)
Leapfrog integration
Adaptive leapfrog with doubling
Tuning parameters
Step size \(\sigma\)
Step size \(\epsilon\), trajectory length \(L\)
Step size \(\epsilon\) (auto-tuned)
Typical acceptance
23-50%
60-90%
65-95%
Autocorrelation
High (\(\tau \sim\) 100-1000)
Low (\(\tau \sim\) 3-10)
Very low (\(\tau \sim\) 2-5)
ESS efficiency
~1-5% of samples
~10-30% of samples
~20-50% of samples
Cost per iteration
Very cheap (1 eval)
Moderate (\(L\) gradient evals)
Moderate-expensive (adaptive \(L\))
Best for
Simple, uncorrelated posteriors
Correlated posteriors (d < 100)
General purpose, production
Worst for
Strongly correlated, high-d
When gradients unavailable
Low-d (overhead not worth it)
Requires derivatives?
❌ No
✅ Yes (finite diff or autodiff)
✅ Yes (autodiff recommended)
Robustness
Works everywhere (slowly)
Sensitive to \(\epsilon\), \(L\)
Very robust
Implementation complexity
Simple (~20 lines)
Moderate (~50 lines)
Complex (~200 lines)
When posteriors multi-modal
Can work (eventually)
Can get stuck
Can get stuck
Scales to high-d?
❌ No (d > 20 struggles)
⚠️ Moderate (d ~ 100)
✅ Yes (d ~ 1000s with autodiff)
Professional tools
emcee (astronomy)
Custom implementations
Stan, PyMC, NumPyro
Key insights from the comparison:
There’s no free lunch: HMC/NUTS require gradients and careful energy conservation, but reward you with exponentially better efficiency for hard problems.
Cost vs efficiency trade-off:
M-H: Cheap iterations, but you need many, so total cost stays high for correlated posteriors
HMC/NUTS: Expensive iterations because of gradient evaluations, but you need far fewer, so total cost is often lower
When M-H is actually fine: If your posterior is simple (uncorrelated, low-dimensional), M-H works perfectly well. Don’t over-engineer!
Why NUTS won: By eliminating manual tuning of \(L\), NUTS made gradient-based MCMC accessible to non-experts. This is why it’s the default in Stan and PyMC.
The autodiff revolution: NUTS + JAX autodiff scales to thousands of parameters. This combination powers modern Bayesian deep learning and inference in complex simulators.
Practical decision tree:
Is your posterior correlated or high-dimensional?
│
├─ No (simple, uncorrelated, d < 10)
│ └─-> Use Metropolis-Hastings
│ └─-> Simple, fast, good enough
│
└─ Yes (correlated or d > 10)
│
├─ Can you compute gradients?
│ │
│ ├─ No (black-box likelihood, discrete parameters)
│ │ └─-> Use ensemble MCMC (emcee)
│ │ └─-> No gradients, but uses multiple walkers
│ │
│ └─ Yes
│ │
│ ├─ Learning/prototyping?
│ │ └─-> Implement vanilla HMC
│ │ └─-> Understand the algorithm deeply
│ │
│ └─ Production/research?
│ └─-> Use NUTS (Stan/PyMC/NumPyro)
│ └─-> Automatic tuning, battle-tested
│
└─ Is posterior multimodal?
└─-> All methods struggle!
└─-> Try: Tempered MCMC, nested sampling, or VI
The bottom line: For Project 4 (cosmology with correlated \(\Omega_m\) and \(h\)), HMC will dramatically outperform M-H. You’ll see this firsthand!
Beyond NUTS: The Broader MCMC Landscape
NUTS is state-of-the-art for general-purpose MCMC, but it’s not the end of the story. Here’s a glimpse of other advanced methods:
Riemannian Manifold HMC: Adapts the mass matrix \(M\) locally based on posterior curvature (Hessian). Especially powerful for posteriors with highly varying scales.
Ensemble MCMC (affine-invariant, emcee): Multiple walkers explore together. No gradients needed! Good for multimodal posteriors. Used widely in astrophysics.
Variational Inference (VI): Approximate posterior by optimization (not sampling). Much faster than MCMC but less accurate. Trade-off: speed vs exactness.
Neural network-assisted MCMC: Learn proposal distributions via deep learning. State-of-the-art for extremely high dimensions (thousands of parameters).
When to use what: - Simple posteriors (d < 10): Random walk M-H works fine - Correlated posteriors (d = 10-100): HMC or NUTS - High dimensions (d = 100-1000): HMC with JAX on GPU - Very high dimensions (d > 1000): VI or hybrid methods - Multimodal posteriors: Ensemble methods or tempered MCMC - Real-time inference: VI or approximate methods
The frontier: Combining MCMC with machine learning (learning optimal proposals, amortized inference, simulation-based inference). This is where Module 6 leads!
Part 6: JAX and the Future of Gradient-Based Inference (🟡 Important)
Why JAX Matters
You’ve seen that HMC needs gradients. Computing gradients efficiently is the bottleneck for scaling to high dimensions. This is where JAX transforms the game.
JAX is Google’s library for high-performance numerical computing. It brings three superpowers:
Automatic Differentiation (Autodiff): Compute exact gradients for any Python function via jax.grad()
Just-In-Time (JIT) Compilation: Compile Python to optimized machine code via jax.jit()
Hardware Acceleration: Same code runs on CPU, GPU, TPU with no changes
Why Google developed JAX: Modern machine learning requires efficient gradients for training neural networks with billions of parameters. JAX enables this at scale.
Why you should care: JAX makes gradient-based inference (HMC, VI, ML) practical for high-dimensional problems. In Module 6, you’ll use JAX for physics-informed neural networks and differentiable simulations.
JAX Autodiff: A Quick Tour
The power of autodiff: Recall from Part 2 that automatic differentiation computes exact gradients with the cost of one function evaluation (not \(2d\) like finite differences).
In JAX, getting gradients is trivial:
import jaximport jax.numpy as jnp# Define a functiondef f(x):return jnp.sum(x**2)# Get its gradient (automatic!)grad_f = jax.grad(f)# Use itx = jnp.array([1.0, 2.0, 3.0])gradient = grad_f(x) # Returns [2.0, 4.0, 6.0]
That’s it. JAX computes \(\nabla f\) automatically by tracing the computation graph and applying the chain rule.
For HMC, this means:
# Your log-posterior functiondef log_posterior(theta): log_like =# ... your likelihood ... log_prior =# ... your prior ...return log_like + log_prior# Get gradient function (one line!)grad_log_posterior = jax.grad(log_posterior)# Use in HMCtheta = jnp.array([0.3, 0.7]) # Current parametersgrad = grad_log_posterior(theta) # Gradient for HMC
Speed comparison (d = 100 parameters): - Finite differences: about 200 likelihood evaluations per gradient, so slow - JAX autodiff: about 1 likelihood evaluation per gradient, roughly \(200\times\) faster
For high-dimensional problems, this is the difference between hours and minutes.
JAX JIT: Make Code Fast
Just-In-Time compilation: JAX can compile Python functions to optimized machine code (like C++ or Fortran) automatically.
Example:
@jax.jit# Compile this function!def leapfrog_step(theta, p, epsilon, grad_fn): p = p + (epsilon/2) * grad_fn(theta) theta = theta + epsilon * p p = p + (epsilon/2) * grad_fn(theta)return theta, p# First call: JAX compiles the function (takes a moment)theta, p = leapfrog_step(theta, p, epsilon, grad_log_post)# Subsequent calls: Run compiled code (10-100x faster!)for _ inrange(1000): theta, p = leapfrog_step(theta, p, epsilon, grad_log_post)
Speedup: often 10-100x for numerical code such as loops and array operations. The more complex your code, the bigger the speedup.
GPUs for free: Change jax.jit to run on GPU? Nothing! JAX handles device placement automatically. Your HMC code runs on GPU without modification.
The JAX Ecosystem for Inference
NumPyro: Probabilistic programming in JAX. Uses NUTS under the hood.
import numpyrofrom numpyro.infer import MCMC, NUTSdef model(x, y):# Define your Bayesian model slope = numpyro.sample('slope', dist.Normal(0, 10)) intercept = numpyro.sample('intercept', dist.Normal(0, 10)) sigma = numpyro.sample('sigma', dist.HalfNormal(1)) mu = intercept + slope * x numpyro.sample('y', dist.Normal(mu, sigma), obs=y)# Run NUTS (fully automatic!)nuts_kernel = NUTS(model)mcmc = MCMC(nuts_kernel, num_warmup=1000, num_samples=2000)mcmc.run(jax.random.PRNGKey(0), x=x_data, y=y_data)# Get resultssamples = mcmc.get_samples()
BlackJAX: Lower-level MCMC library (like your from-scratch implementation, but production-ready). Modular design — mix and match samplers, diagnostics, adaptation strategies.
Why learn JAX now: Module 6 uses JAX extensively for differentiable physics simulations and physics-informed neural networks. Getting comfortable with JAX syntax now pays dividends later.
Modern inference workflow: 1. Write model in JAX (probabilistic program) 2. Automatic gradients via jax.grad() 3. JIT-compile for speed 4. Run NUTS on GPU (handles tuning automatically) 5. Diagnose and visualize (arviz, corner.py)
This is how professionals do inference today. You’re learning the cutting edge.
Looking ahead: - Module 6 (Physics-Informed Learning): Use JAX to build differentiable simulators, train neural networks to solve PDEs, combine data and physics - Research frontiers: Simulation-based inference, neural posterior estimation, amortized MCMC - Your future: These tools will be part of your computational toolkit for any domain — astrophysics, climate science, biology, finance, ML research
The glass-box journey: You built MCMC from scratch (Part 3), understood the physics (Part 4), implemented HMC, and now see the professional tools (JAX, NumPyro). You’re not a black-box user — you’re a computational scientist who understands the foundations.
Part 7: Synthesis and Looking Forward
What We’ve Learned: The Journey from Random Walks to Hamiltonian Flow
Part 3 (Metropolis-Hastings): - Random walk proposals: Universal but sometimes inefficient - Works well for simple posteriors - Struggles with correlated, high-dimensional problems
Part 4 (HMC): - Use gradients to guide proposals - Reframe sampling as a physics problem (Hamiltonian dynamics) - Ballistic trajectories follow posterior geometry - Massive efficiency gains (often 10-100x fewer samples needed)
The connections:
Concept
Module 1
Module 3
Module 5 (Part 3)
Module 5 (Part 4)
What we sample
Random variables
Microstates
Parameters (random walk)
Parameters (Hamiltonian)
Target distribution
Population
Boltzmann
Posterior \(p(\theta \mid D)\)
Posterior \(p(\theta \mid D)\)
How we sample
IID draws
Molecular dynamics
Markov chain (M-H)
Markov chain (HMC)
Key property
Law of Large Numbers
Ergodicity
Detailed balance
Hamiltonian conservation
Dynamics
Static
Newton’s laws
Stochastic jumps
Leapfrog integration
Efficiency
Perfect (independent)
Limited by collision rate
Limited by correlation
High (gradient-guided)
The profound unity: Whether you’re: - Sampling from a distribution to estimate its mean (Module 1) - Simulating molecules exploring phase space (Module 3) - Running MCMC to quantify parameter uncertainty (Module 5 Part 3) - Using HMC to sample posteriors efficiently (Module 5 Part 4)
You’re using variations of the same mathematical structure: stochastic or deterministic processes converging to equilibrium distributions, with time averages equaling ensemble averages.
This is why physics is powerful. The same principles work everywhere — from atoms to galaxies to probability distributions.
Where This Leads: Your Path Forward
Immediate: Project 4
You’ll apply HMC to real cosmology data: - Measure \(\Omega_m\) (matter density) and \(h\) (Hubble constant) from Type Ia supernovae - Implement HMC using your Project 2 leapfrog integrator - Compare efficiency: M-H vs HMC (experience the speedup yourself) - Use the same data that won the 2011 Nobel Prize for discovering dark energy
Skills you’ll use: - Bayesian model specification (likelihood + priors) - Gradient computation (finite differences or JAX) - HMC implementation (adapting your leapfrog code) - Convergence diagnostics (trace plots, R-hat, ACF, energy conservation) - Result visualization (corner plots, credible intervals)
Near future: Module 6
Physics-informed learning: - Build differentiable physics simulators in JAX - Train neural networks to solve PDEs - Combine data-driven and physics-based modeling - Learn inverse problems (infer parameters from observations)
Long term: Your research
These tools are universally applicable: - Astrophysics: Exoplanet characterization, stellar populations, cosmological inference - Climate science: Parameter estimation in Earth system models - Particle physics: Analyzing LHC collision data - Biology: Fitting dynamical models to experimental data - Machine learning: Bayesian deep learning, uncertainty quantification
The glass-box philosophy in action: You didn’t just learn to use Stan or PyMC. You: - Understood why gradients are powerful (calculus \(\to\) optimization \(\to\) sampling) - Derived HMC from first principles (Hamiltonian mechanics) - Implemented it yourself (can debug when things break) - Connected it to physics you already know (Project 2, Module 3) - Know when to use it (correlated posteriors, high dimensions) - Understand the tools (JAX, autodiff, professional software)
Bottom line: You’re not a black-box user. You’re a computational scientist.
Self-Assessment Rubric
Before moving to Project 4, assess your mastery of Part 4. Be honest — identifying gaps now makes the project more productive.
Level 1: Conceptual Understanding
Can you explain the ideas to someone else?
Level 2: Physics Connection
Can you see the unity across modules?
Level 3: Mathematical Foundations
Can you derive key results?
Level 4: Implementation Skills
Can you code HMC from scratch?
Level 5: Diagnostic Expertise
Can you tell if your HMC sampler is working?
Level 6: Tool Awareness
Do you understand the modern ecosystem?
Level 7: Connections and Transfer
Can you see how HMC fits into the bigger picture?
Reflection: Which levels feel solid? Which need more work? Use this to guide your Project 4 strategy and what to review.
Conceptual Checkpoints (Throughout)
Tip🤔 Checkpoint 1: The Correlation Problem
Question: Why does an isotropic proposal distribution (like \(N(\theta, \sigma^2 I)\)) struggle with a strongly correlated posterior?
Answer: The posterior has different “widths” in different directions (narrow perpendicular to ridge, wide along ridge). Isotropic proposals don’t match this geometry — they propose equally in all directions. You can’t choose a single \(\sigma\) that works well both along and perpendicular to the ridge.
Followup: How do gradients help? They point “uphill” along the ridge, giving directional information that isotropic proposals lack.
Tip🤔 Checkpoint 2: Gradients as Directional Information
Question: In optimization, we follow gradients to find maxima/minima. In HMC, we’re sampling, not optimizing. Why do gradients still help?
Answer: Gradients tell us which direction increases probability (uphill in log-posterior space). HMC uses this to make large moves toward high-probability regions while maintaining high acceptance rates. We’re not optimizing (finding the peak), but we’re letting gradient information guide proposals along high-probability ridges.
Key insight: Good proposals should follow the posterior’s geometry. Gradients reveal that geometry.
Tip🤔 Checkpoint 3: The Hamiltonian Analogy
Question: In what sense is HMC “the same” as N-body simulation?
Answer:
N-body: Particles with positions \(\mathbf{r}\), momenta \(\mathbf{p}\), potential \(U(\mathbf{r})\) (gravity), kinetic \(K(\mathbf{p})\), Hamiltonian \(H = U + K\)
Both systems: Evolve via Hamilton’s equations, conserve \(H\) (up to discretization error), use leapfrog integration (symplectic, time-reversible). The mathematics is identical; only the interpretation differs.
Profound realization: Sampling from a probability distribution is mathematically equivalent to simulating a dynamical system!
Tip🤔 Checkpoint 4: Why Negate Momentum?
Question: In the HMC algorithm, after the leapfrog integration, we negate momentum: \(p_\text{new} \gets -p_\text{new}\). Why?
Answer: Detailed balance requires time-reversibility. The proposal from \(\theta\) to \(\theta'\) must have the same probability as the reverse proposal from \(\theta'\) to \(\theta\).
If we run leapfrog forward to go \(\theta \to \theta'\) with momentum \(p\), then to reverse the trajectory (go \(\theta' \to \theta\)), we must start with momentum \(-p\) (pointing backward). Negating momentum after the forward trajectory ensures the reverse trajectory exists and has the correct probability.
Without momentum negation: Detailed balance would be violated, so the sampler would not converge to the correct posterior.
Tip🤔 Checkpoint 5: NUTS Stopping Criterion
Question: NUTS stops when \((\theta_\text{end} - \theta_\text{start}) \cdot p_\text{end} < 0\). Interpret this geometrically.
Answer:
\((\theta_\text{end} - \theta_\text{start})\) = displacement vector from start to current position
\(p_\text{end}\) = current momentum vector (velocity direction)
Dot product < 0 means these vectors point in opposite directions
Momentum now points back toward the start, indicating a U-turn
Geometric picture: Imagine a ball rolling on a curved surface. It rolls uphill, reaches maximum height, and then starts rolling back. At that moment, the velocity points back toward the start, which is exactly the U-turn condition.
Why stop here: Continuing would waste computation (revisiting already-sampled regions). NUTS stops right before this inefficiency kicks in.
Looking Ahead: Project 4 and the Universe
You now have the tools to measure the contents of the universe. Seriously.
Project 4 preview: Type Ia supernovae cosmology
Data: ~600 SNe distances vs redshifts (publicly available)
Model: \(d_L(z; \Omega_m, h)\) from Friedmann equations (cosmological distance-redshift relation)
Inference: Use HMC to sample \(p(\Omega_m, h | \text{SNe data})\)
Result: Measure how much matter vs dark energy the universe contains
This is real science. The same analysis won the 2011 Nobel Prize in Physics for discovering cosmic acceleration (dark energy). You’re not just practicing methods — you’re doing frontier research with public data.
What you’ll experience:
M-H struggles: Correlated posterior, slow mixing, need 500k samples
HMC succeeds: Same posterior, 20k samples sufficient, about \(25\times\) faster
The “aha!” moment: When you see HMC trace plots vs M-H side-by-side and viscerally understand why gradients matter
Beyond this course: These methods generalize to any inference problem — exoplanets, stellar evolution, black hole mergers, climate models, drug discovery, economics, you name it. Gradient-based MCMC is a universal tool.
Module 6 awaits: Physics-informed neural networks, differentiable simulations, combining data and theory. JAX becomes central. The journey continues from inference to learning.
Now go forth and sample the universe.
Further Resources (Optional)
For deeper understanding:
Neal (2011): “MCMC using Hamiltonian dynamics” — The definitive review article, clear and comprehensive
Betancourt (2017): “A Conceptual Introduction to Hamiltonian Monte Carlo” — Excellent conceptual explanations with visualizations
Hoffman & Gelman (2014): “The No-U-Turn Sampler” — Original NUTS paper