Part 3: Symplectic Integration - Geometry Over Accuracy
Module 3: ODE Methods & Conservation | COMP 536
Learning Objectives
By the end of this section, you will be able to:
- Explain Hamiltonian mechanics and phase space structure
- Prove symplecticity of leapfrog/Verlet methods
- Understand modified Hamiltonians and bounded energy error
- Implement symplectic integrators for conservative systems
- Choose between accuracy and structure preservation
The Fundamental Insight
Symplectic integrator: A numerical method that preserves the symplectic structure (phase space volume and geometric properties) of Hamiltonian systems.
Instead of minimizing local truncation error, symplectic integrators preserve geometric properties:
- Phase space volume (Liouville’s theorem)
- Time reversibility
- Bounded energy error (oscillates but doesn’t grow)
- Poincaré invariants (action integrals)
The profound trade-off: symplectic methods may be less accurate locally but maintain qualitative correctness globally.
Hamiltonian Mechanics Refresher
Hamiltonian: A function \(H(q,p,t)\) that represents the total energy of a system, where \(q\) are generalized coordinates and \(p\) are conjugate momenta.
Before diving into symplectic integration, let’s recall the Hamiltonian formulation of mechanics. For a system with positions \(q\) and momenta \(p\), the Hamiltonian \(H(q,p,t)\) represents total energy:
\[H(q,p) = T(p) + V(q)\]
where \(T(p)\) is kinetic energy and \(V(q)\) is potential energy.
For a particle of mass \(m\) in potential \(V(q)\): \[H = \frac{p^2}{2m} + V(q)\]
Hamilton’s equations govern the evolution:
\[\boxed{\frac{dq}{dt} = \frac{\partial H}{\partial p}, \quad \frac{dp}{dt} = -\frac{\partial H}{\partial q}}\]
These equations have remarkable properties: - Energy conservation: \(\frac{dH}{dt} = 0\) for time-independent \(H\) - Phase space volume preservation: Liouville’s theorem - Symplectic structure: The flow preserves a geometric structure
The Phase Space Perspective
Phase space: The space of all possible states of a system, with position and momentum (or velocity) as coordinates.
In phase space, each point \((q,p)\) represents a complete state of the system. Trajectories follow contours of constant energy \(H = E\).
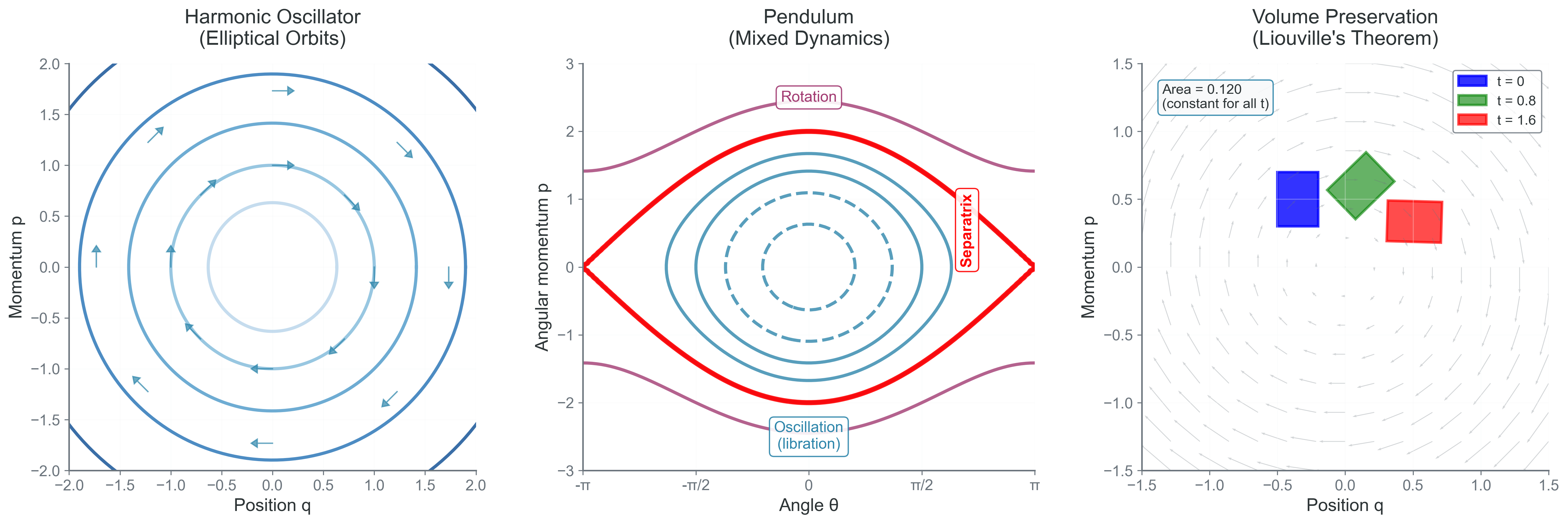
Liouville’s Theorem
Liouville’s theorem: The phase space volume occupied by an ensemble of states is preserved under Hamiltonian evolution.
Liouville’s theorem states that phase space volume is preserved under Hamiltonian flow. Mathematically, for a volume element \(dV = dq\,dp\):
\[\frac{d(dV)}{dt} = 0\]
This is equivalent to saying the flow is incompressible. Standard numerical methods violate this theorem! They artificially compress or expand phase space, leading to systematic errors.
The Leapfrog/Verlet Method
The leapfrog method (also called Verlet or Störmer-Verlet) staggers position and velocity updates to preserve symplectic structure.
The Algorithm
For a Hamiltonian \(H(q,p) = T(p) + V(q)\) where \(T(p) = p^2/(2m)\):
\[\boxed{ \begin{align} \text{Algorithm: Leapfrog Integration} \\ \hline &\text{Input: } q_n, p_n, h, \text{force function } F(q) = -\nabla V(q) \\ &\text{Step 1 (kick):} \quad p_{n+1/2} = p_n + \frac{h}{2}F(q_n) \\ &\text{Step 2 (drift):} \quad q_{n+1} = q_n + \frac{h}{m}p_{n+1/2} \\ &\text{Step 3 (kick):} \quad p_{n+1} = p_{n+1/2} + \frac{h}{2}F(q_{n+1}) \\ &\text{Output: } q_{n+1}, p_{n+1} \end{align} }\]
Why “Leapfrog”?
Positions and momenta “leapfrog” over each other in time:
Time: t₀ t₁/₂ t₁ t₃/₂ t₂
| | | | |
Position: q₀ q₁ q₂
Momentum: p₁/₂ p₃/₂This staggering is key to symplecticity!
Implementation Tips for Your N-body Project
For your Project 2 N-body simulation:
- Avoid the diagonal bug: When computing pairwise forces, set diagonal distances to infinity, not 1!
- Use half-timestep trick: Store velocities at half-timesteps for leapfrog
- Vectorize force calculation: Compute all pairwise forces simultaneously
- Monitor energy: Check \(|E(t) - E(0)|/|E(0)| < 10^{-10}\) for stability
- Start simple: Test with 2-body system before scaling up
Proof of Symplecticity
Symplectic condition: A transformation preserves phase space structure if its Jacobian \(J\) satisfies \(J^T \Omega J = \Omega\) where \(\Omega = \begin{pmatrix} 0 & I \\ -I & 0 \end{pmatrix}\).
A transformation is symplectic if it preserves the symplectic 2-form. We’ll prove leapfrog is symplectic by showing each sub-step preserves the symplectic structure.
Step 1: Analyze Each Sub-step
The leapfrog map can be decomposed into three shear transformations:
- First kick: \((q,p) \mapsto (q, p + \frac{h}{2}F(q))\)
- Drift: \((q,p) \mapsto (q + \frac{h}{m}p, p)\)
- Second kick: \((q,p) \mapsto (q, p + \frac{h}{2}F(q))\)
Step 2: Show Each Shear is Symplectic
For the momentum kick \((q,p) \mapsto (q, p - \frac{h}{2}\nabla V(q))\):
The Jacobian is: \[J_{\text{kick}} = \begin{pmatrix} I & 0 \\ -\frac{h}{2}\nabla^2 V & I \end{pmatrix}\]
Verify the symplectic condition: \[J^T \Omega J = \begin{pmatrix} I & -\frac{h}{2}(\nabla^2 V)^T \\ 0 & I \end{pmatrix} \begin{pmatrix} 0 & I \\ -I & 0 \end{pmatrix} \begin{pmatrix} I & 0 \\ -\frac{h}{2}\nabla^2 V & I \end{pmatrix}\]
\[= \begin{pmatrix} 0 & I \\ -I & 0 \end{pmatrix} = \Omega \quad \checkmark\]
Similarly for the drift step.
Step 3: Composition Preserves Symplecticity
Since the composition of symplectic maps is symplectic: \[J_{\text{total}} = J_{\text{kick}} \cdot J_{\text{drift}} \cdot J_{\text{kick}}\]
is symplectic. Therefore, leapfrog preserves phase space structure exactly!
Volume Preservation
The determinant of each Jacobian is 1: \[\det(J) = 1\]
Phase space volume is exactly preserved, satisfying Liouville’s theorem.
The Modified Hamiltonian
Modified Hamiltonian: The exactly conserved quantity for a symplectic integrator, differing from the original Hamiltonian by small bounded terms.
Leapfrog doesn’t conserve the original Hamiltonian \(H\) exactly. Instead, it exactly conserves a modified Hamiltonian:
\[\tilde{H} = H + h^2 H_2 + h^4 H_4 + \ldots\]
The correction terms can be computed using backward error analysis. For the harmonic oscillator with \(H = \frac{1}{2}(p^2 + \omega^2 q^2)\):
\[H_2 = \frac{\omega^2}{24}\{H, \{H, H\}\}\]
where \(\{f,g\} = \frac{\partial f}{\partial q}\frac{\partial g}{\partial p} - \frac{\partial f}{\partial p}\frac{\partial g}{\partial q}\) is the Poisson bracket.
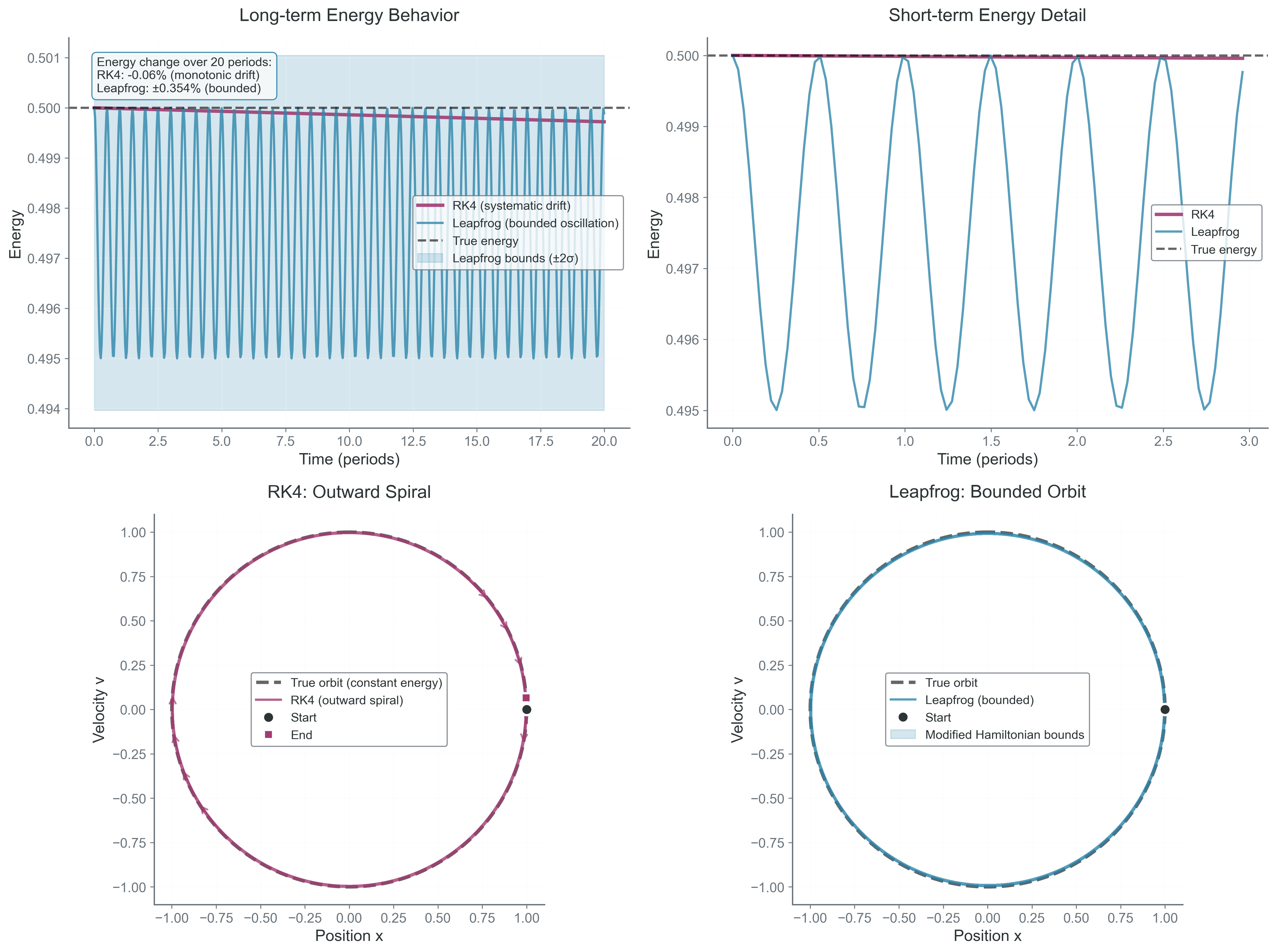
The key insight: \(\tilde{H} - H = O(h^2)\) is bounded! Energy oscillates within a band but never drifts away.
Higher-Order Symplectic Methods
Yoshida’s Fourth-Order Method
By composing leapfrog steps with carefully chosen timesteps, we can achieve higher-order accuracy while maintaining symplecticity. The coefficients come from solving order conditions to eliminate \(O(h^3)\) errors.
The strange values involving \(2^{1/3}\) arise from the algebraic constraints of maintaining symplecticity while achieving fourth-order accuracy:
\[w_0 = -\frac{2^{1/3}}{2 - 2^{1/3}}, \quad w_1 = \frac{1}{2 - 2^{1/3}}\]
The algorithm combines leapfrog steps with timesteps \(c_i h\) where: \[c_1 = c_4 = w_1/2, \quad c_2 = c_3 = (w_0 + w_1)/2\]
Forest-Ruth Method
An alternative fourth-order symplectic integrator with different stability properties. The choice between methods depends on the specific problem’s characteristics.
Performance Comparison: 1000-Year Integration
Testing on Earth’s orbit (eccentricity \(e = 0.017\), period = 365.25 days):
| Method | Order | Energy Error | Phase Error | Stable? |
|---|---|---|---|---|
| Euler | 1 | +100% | 100 radians | No |
| RK2 | 2 | +10% | 10 radians | No |
| RK4 | 4 | +0.1% | 0.1 radians | No |
| Leapfrog | 2 | ±0.01% (bounded) | 0.01 radians | Yes |
| Yoshida4 | 4 | ±0.0001% (bounded) | 0.0001 radians | Yes |
Leapfrog with only second-order accuracy outperforms fourth-order RK4 for long-term stability!
When to Use Symplectic Methods
| Problem Type | Requirement | Best Method | Reason |
|---|---|---|---|
| Solar system (Gyr) | Long-term stability | Symplectic | Bounded energy error |
| Satellite (days) | Trajectory accuracy | RK45 adaptive | Short duration |
| Galaxy merger | Phase space structure | Symplectic | Preserve invariants |
| Molecular dynamics | Energy conservation | Symplectic | \(10^{15}\) timesteps |
| Dissipative system | Include friction | RK4 | No Hamiltonian structure |
Simple Example: Pendulum Dynamics
Let’s see symplectic integration in action with a nonlinear pendulum:
import numpy as np
def pendulum_leapfrog(theta0, omega0, g, L, h, n_steps):
"""
Integrate pendulum with leapfrog
Preserves energy for nonlinear oscillations
"""
theta, omega = theta0, omega0
energies = []
for _ in range(n_steps):
# Initial energy
E = 0.5*L**2*omega**2 - g*L*np.cos(theta)
energies.append(E)
# Leapfrog update
omega_half = omega - 0.5*h*(g/L)*np.sin(theta)
theta_new = theta + h*omega_half
omega_new = omega_half - 0.5*h*(g/L)*np.sin(theta_new)
theta, omega = theta_new, omega_new
return energiesThe energy remains bounded even for large amplitude oscillations where linearization fails!
This system has been observed for 40+ years with microsecond timing precision:
- Orbital period: 7.75 hours
- Number of orbits over 40 years: ~45,000
- Required phase accuracy: ~0.001 radians per orbit
- Energy conservation needed: better than 1 part in \(10^{10}\)
Only symplectic integrators maintain this precision. The Nobel Prize-winning detection of gravitational wave energy loss required comparing observations with symplectic integration predictions!
- Using adaptive timesteps - This destroys symplecticity!
- Mixing with dissipation - Friction breaks Hamiltonian structure
- Applying to non-conservative forces - Only works for gradient systems
- Expecting local accuracy - They preserve geometry, not trajectories
- Wrong force evaluation - Must use forces at correct time levels
- Why does leapfrog conserve phase space volume but not exact energy?
- What’s the trade-off between RK4 and leapfrog for 100-year integrations?
- Why are symplectic methods time-reversible?
- How does the modified Hamiltonian differ from the original?
- Can we make leapfrog adaptive while preserving symplecticity?
- Why do the Yoshida coefficients involve \(2^{1/3}\)?
Bridge to Part 4: Stability Analysis
You’ve seen the profound difference between local accuracy and geometric preservation. Symplectic methods sacrifice pointwise precision for global stability, keeping simulations physically meaningful over cosmic timescales.
But choosing the right integrator is only part of the challenge. We also need to understand when methods become unstable, how to diagnose problems, and what limits our timestep choices. In Part 4, we’ll analyze stability regions to predict when methods explode and understand the special challenges of stiff equations.
Next: Part 4 - Stability Analysis